
Underwater Autonomous Autos face difficult environments the place GPS Navigation isn’t potential. John McConnell discusses his analysis, offered at ICRA 2022, into fusing overhead imagery with conventional SLAM algorithms. This analysis ends in a extra strong localization and mapping, with decreased drift generally seen in SLAM algorithms.
Satellite tv for pc imagery may be obtained without spending a dime or low value via Google or Mapbox, creating an simply deployable framework for corporations in trade to implement.
Hyperlinks
transcript
[00:00:00] I’m John McConnell:. That is overhead picture components for underwater sonar-based SLAM. So first let’s discuss SLAM. Slam permits us to estimate the car state and map as we go. Nevertheless, as mission progresses, drift will accumulate. We want loop closures to reduce this drift. Nevertheless, these aren’t trajectory dependent and sometimes ambiguous.
So the analysis query on this work is how can we use overhead pictures to reduce the drift in our sonar primarily based SLAM system.
So first overhead pictures are free or very low value from distributors like Mapbox and Google could are available in at the same decision to our sonar sensor at 5 to 10 centimeters,
some key challenges to be used overhead pictures are in RGB. Sonar just isn’t, uh, overhead pictures additionally are available in and so they, uh, top-down view. Or sonar pictures are extra of a water degree view. [00:01:00] Uh, and clearly, uh, , the vessels could also be in numerous areas between picture seize, time and mission execution time.
okay. So what do we offer to the car a priori? We’ve a practical slam resolution, albeit with drift and preliminary GPS. After which this overhead picture segmentation proven in inexperienced, this identifies the construction. That’s going to be helpful as an assist to navigation on this algorithm.
so conceptually, we’re going to begin at this crimson dot. We’re going to maneuver alongside some trajectory to our present state. We’re going to say, “what ought to I see?” When it comes to the inexperienced segmentation. We are able to examine that to what we really see within the sonar imagery, resolve the variations in look, after which discover the transformation between these two information buildings.
okay. So high left inexperienced, with black background, we’ve got the candidate overhead picture, which is simply what we must always [00:02:00] see at our present state. We’ve a sonar picture from the identical time step, we’re going to take these and push them collectively into UNET. The output of UNET proven right here in magenta with black background, we are able to use the output of UNET, which is the candidate overhead picture remodeled into the sonar picture body with the unique candidate, overhead picture in ICP to search out the transformation between these two.
We are able to then roll that in to our sine graph..
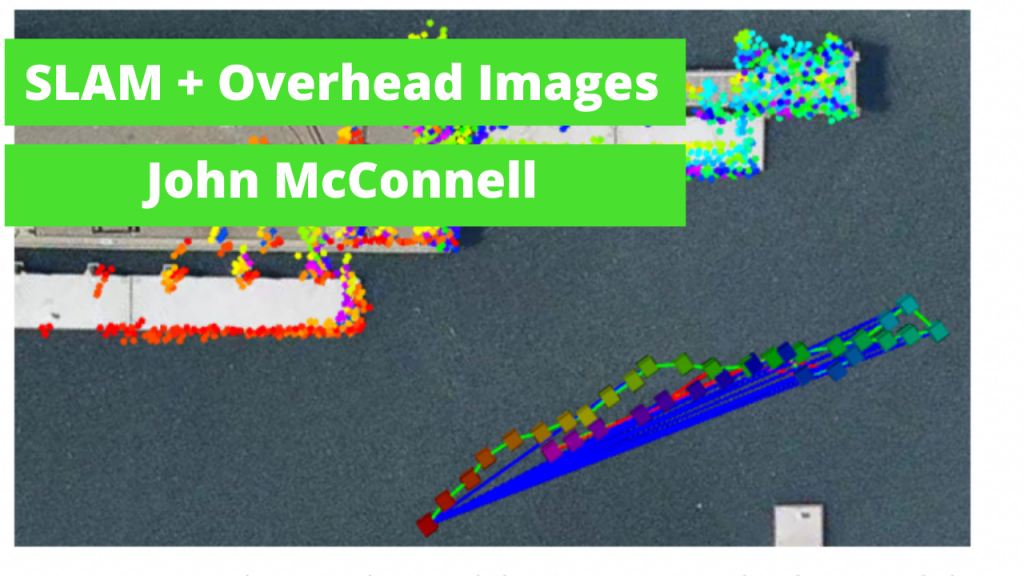
on the left. We’ve an instance of slam mission with out overhead picture components, inexperienced traces or odometry crimson traces are loop closures. You may see in comparison with the grey overhead picture masks. Drift is closely evident. Once we add the blue traces on the right-hand facet, the overhead picture components you’ll be able to see, we drastically scale back that mission drift in comparison with the grey overhead picture masks.
So to spotlight the [00:03:00] novelty of our framework, we’re capable of resolve the variations between the overhead pictures and the sonar pictures and roll these overhead picture components into our already functioning slam system. Decreasing the mission drift. We’re additionally capable of show within the paper that we are able to prepare in simulation and performance on actual world information.
Abate: Are you able to inform me just a little bit about your presentation simply now?
John McConnell: Positive. So we’re utilizing overhead pictures that are satellite tv for pc pictures or pictures captured from a low flying UAV as an help for an underwater car utilizing a sonar primarily based SLAM resolution, uh, to scale back its drift.
Abate: Yeah. So this, you mentioned that is, or a unmanned floor automobiles or underwater automobiles?
John McConnell: That is for unmanned underwater automobiles.
Abate: Okay. All proper. Is it restricted to unmanned underwater automobiles? Why not additionally use it for…?
John McConnell: You should utilize it for any system you’d need, um, that’s utilizing sonar as the first perceptual enter. Uh, that’s additionally accumulating drift.[00:04:00]
The rationale we deal with unmanned underwater automobiles is as a result of GPS doesn’t work beneath water, proper? So we’re, we’re doing is utilizing these overhead pictures as a GPS proxy, principally to take a secure SLAM resolution. That’s drifting with time, it’s getting worse with time and we’re taking have a look at these overhead pictures we’re utilizing, uh, CNN convolutional, neural community.
To work out what precisely is in our sonar imagery and our overhead imagery to fuse them and scale back the slam drift.
Abate: Yeah. So principally, as you’re doing all of your slam, it’s fairly good on the piece to piece, uh, localization, however then it drifts over time and that is permitting you to remain locked in, in place.
John McConnell: Yeah.
We are able to simply say, , preserve it on the rails, proper? Yeah.
Abate: So, after which the, um, so the imagery that you just’re getting satellite tv for pc imagery. The place are you getting this from?
John McConnell: Yeah. So it is a free or very low value from [00:05:00] distributors like Mapbox, Google, and I’m certain there’s different ones on the market. And if, uh, , you had been working in a navy software, you’d have entry to some even higher, yeah, satellite tv for pc imagery, uh, or you possibly can use, , uh, DGI Phantom to place it up over the survey space earlier than you exit on it. So it’s, it’s fairly versatile with regard to the supply of the overhead imagery, however we do phase it. Uh, so we determine the construction that we care about and the construction that we don’t care about.
Abate: Yeah. So perhaps for a excessive value software, then you’ll be able to really get a drone, go on the market and map it your self.
John McConnell: Yeah. Or yeah. Or process a satellite tv for pc. Yeah.
Abate: Or a process to settle. Yeah, so, and, um, nicely, so what’s the frequency price that say the satellite tv for pc pictures are usually updating by after which, is that this one thing that you consider as you’re finding your SLAM algorithm on the satellite tv for pc imagery?
John McConnell: Yeah. So your query is actually, if I’ve my, uh, satellite tv for pc picture or my overhead picture of the surroundings, proper. And I take that image [00:06:00] on a Tuesday. However I’m gonna go do my work on Friday, proper. Have issues modified?
And proper. The reply is totally. Sure. Proper. We’re working in a littoral surroundings. So nearshore environments and we take a look at primarily in arenas.
So if you take that overhead picture, you’ve gotten a smattering of small boats, proper? These boats should not in the identical place. Proper? In order that’s why we use this convolutional neural community to assist within the translation, not translation like X, Y, however translation:
“I see this in sonar and I’ve this prior, , sketched out of what ought to be there, given my overhead picture”, however we intentionally omit vessels from the overhead picture segmentation and a part of what the CNN is coaching to study.
Is to additionally omit objects that aren’t current within the overhead imagery.
Abate: So that you’re really detecting like what kind of object is that this? Such as you, you’ll be able to perceive it is a dynamic object. We don’t [00:07:00] anticipate it to be right here tomorrow. Uh, however it is a panorama or it is a constructing or a port…
John McConnell: Or a pier yeah. Yeah. We rely closely on buildings, uh, that we anticipate to not transfer.
Proper? So breakwaters, piers, issues like that,
Abate: And that is all routinely calculated.
John McConnell: We don’t explicitly name out every object and say, okay, it is a vessel. You recognize, I don’t care about this. What we do is we offer a context clue, which we name in our work and a “candidate, overhead picture”. And we additionally use the sonar picture.
We take these and push them into unit collectively and unit simply learns to drop out. Uh, what’s not within the context clues.
Abate: Yeah. And have there been any challenges that you just bumped into?
John McConnell: I imply, many, many, many challenges, uh, if you take a look at an algorithm like this, uh, one, the largest query that comes up is floor fact.
Proper? How do you grade? And the way do you additionally generate sufficient coaching information for a knowledge hungry CNN like unit? Proper. So we’ve got to take care of quite a lot of that, uh, by working in simulation. [00:08:00]
Abate: And do you anticipate this to return out, say to be open supply or to trade? Sure. With any close to timeframe?
John McConnell: Sure.
Abate: When do you anticipate?
John McConnell: Absolutely within the subsequent six months?
We’ve our, uh, open-source SLAM framework, uh, which you’ll be able to have a look. Individuals can get my private GitHub, https://github.com/jake3991. You’ll discover a Repo known as sonar slam that has the baseline slam system. And we’re anticipating to include the overhead picture stuff within the subsequent six months. Superior. Thanks. Yeah. Thanks.
transcript
tags: c-Analysis-Innovation, cx-Mapping-Surveillance, cx-Analysis-Innovation, podcast, Analysis, software program

Abate De Mey
Founding father of Fluid Dev, Hiring Platform for Robotics
Abate De Mey
Founding father of Fluid Dev, Hiring Platform for Robotics





